




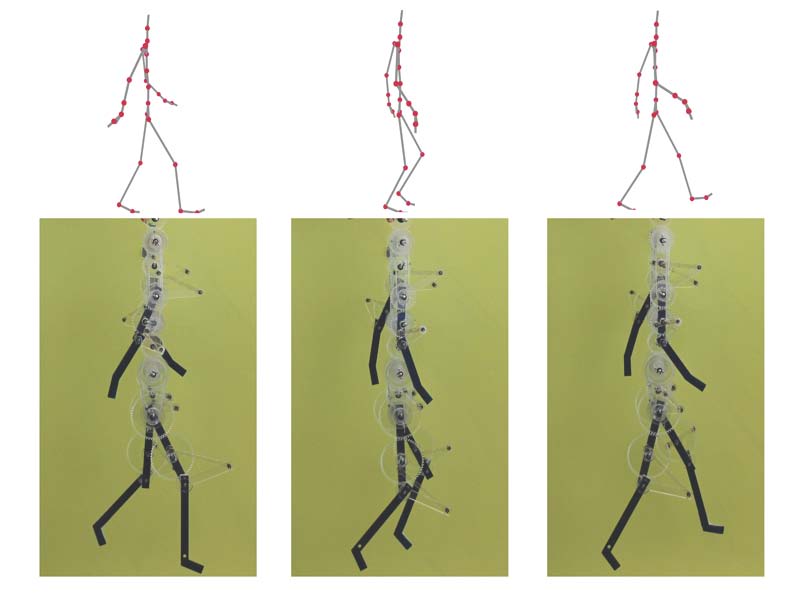
Designing and Fabricating Mechanical Automata from Mocap Sequences
We present an automatic method that takes a motion sequence of a humanoid character and generates the design for a mechanical figure that approximates the input motion when driven by a single constant-speed crank.
Duygu Ceylan, Ecole Polytechnique Federale de Lausanne
Wilmot Li, Adobe Research
Niloy Mitra, University College London
Maneesh Agrawala, University of California Berkeley
Mark Pauly, Ecole Polytechnique Federale de Lausanne

3D Self-Portraits
With our system any ordinary user can capture complete and fully textured 3D models of themselves in minutes, using only a single Kinect sensor, in the uncontrolled lighting environment of their own home.
Hao Li, University of Southern California
Etienne Vouga, Columbia University
Anton Gudym, Artec Group Inc.
Linjie Luo, Adobe Research
Jonathan Barron, University of California, Berkeley
Gleb Gusev, Artec Group, Inc.

Anatomy Transfer
We propose the first semi-automatic method for creating anatomical structures, such as bones, muscles, viscera and fat tissues by
transferring a reference anatomical model from an input template
to an arbitrary target character, only defined by its boundary representation
(skin)
Dicko Ali-Hamadi, Institute National de Recherche en Informatique et en Automatique
Tiantian Liu, University of Pennsylvania
Benjamin Gilles, Centre National de la Recherche Scientifique
Ladislav Kavan, University Of Pennsylvania
Francois Faure, Institute National de Recherche en Informatique et en Automatique
Marie-Paule Cani, Institute National de Recherche en Informatique et en Automatique Rhone-Alpes - Grenoble Universities

Augmenting Physical Avatars using Projector-Based Illumination
Animated animatronic figures are a unique way to give physical presence to a character. We present a complete process for augmenting physical avatars using projector-based illumination, significantly increasing their expressiveness. The result is a highly expressive avatar that features facial details and motion otherwise unattainable due to physical constraints.
Amit Bermano, Disney Research Zurich / Eidgenoessische Technische Hochschule Zurich
Philipp Brüschweiler, Disney Research Zurich / Eidgenoessische Technische Hochschule Zurich
Anselm Grundhöfer, Disney Research Zurich
Daisuke Iwai, Osaka University
Bernd Bickel, Disney Research Zurich
Markus Gross, Disney Research Zurich / Eidgenoessische Technische Hochschule Zurich