





Modeling and Estimation of Internal Friction in Cloth
We propose a model of internal friction of cloth that matches important features of real-world measurements, and we show that it produces distinct behavior to frictionless cloth in simulated examples. We also propose novel parameter estimation procedures that are based on simple and inexpensive setups.
Eder Miguel, Universidad Rey Juan Carlos Madrid
Rasmus Tamstorf, Disney Animation Studios
Derek Bradley, Disney Research Zurich
Sara C. Schvartzman, Universidad Rey Juan Carlos Madrid
Bernhard Thomaszewski, Disney Research Zurich
Bernd Bickel, Disney Research Zurich
Wojciech Matusik, Massachusetts Institute of Technology
Steve Marschner, Cornell University
Miguel A. Otaduy, Universidad Rey Juan Carlos Madrid
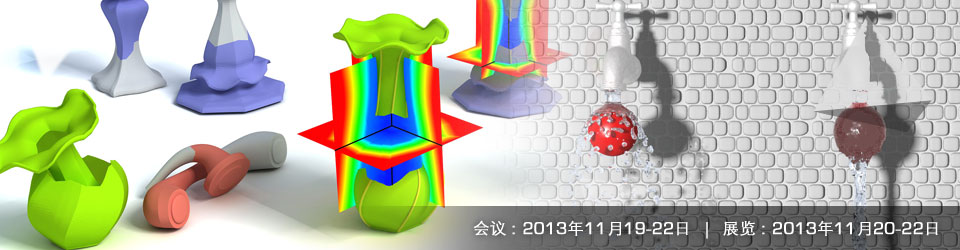
An Efficient Construction of Reduced Deformable Objects
We introduce model reduction techniques for the efficient simulation of deformable objects aiming at accelerating the construction of a reduced dynamical system, increasing the accuracy of the approximation, and simplifying the implementation. Based on the techniques, we introduce schemes for real-time simulation and interactive deformation-based shape editing.
Christoph von Tycowicz, Freie Universität Berlin
Christian Schulz, Max-Planck-Institut für Informatik
Hans-Peter Seidel, Max Planck Institut für Informatik
Klaus Hildebrandt, Max Planck Institut für Informatik
Fast Simulation of Mass-Spring Systems
We present a numerical method for fast implicit time integration of mass-spring systems based on block coordinate descent. Our method produces visually acceptable results for real-time applications.
Tiantian Liu, University of Pennsylvania
Adam Bargteil, University of Utah
James O'Brien, University of California, Berkeley
Ladislav Kavan, University of Pennsylvania

Simulation and Control of Skeleton-driven Soft Body Characters
We present a physics-based framework for simulation and control of human-like skeleton-driven soft body characters. We propose a novel pose-based plasticity model to achieve large skin deformation around joints. We further reconstruct controls from reference trajectories captured from human subjects by augmenting a sampling-based algorithm.
Libin Liu, Tsinghua University
KangKang Yin, National University of Singapore
Bin Wang, National University of Singapore
Baining Guo, Microsoft Research Asia